Application of Remote Sensing Technology in Bathymetric Survey
Introduction
The determination of water depths is important to monitoring underwater topography, detection of moving sediments and to support navigation. To determine water depths, both active and passive remote sensing techniques are used. In fact; the active technique were used to validate passive technique results.
1. Active remote sensing technique: light detection and ranging “LIDAR”:
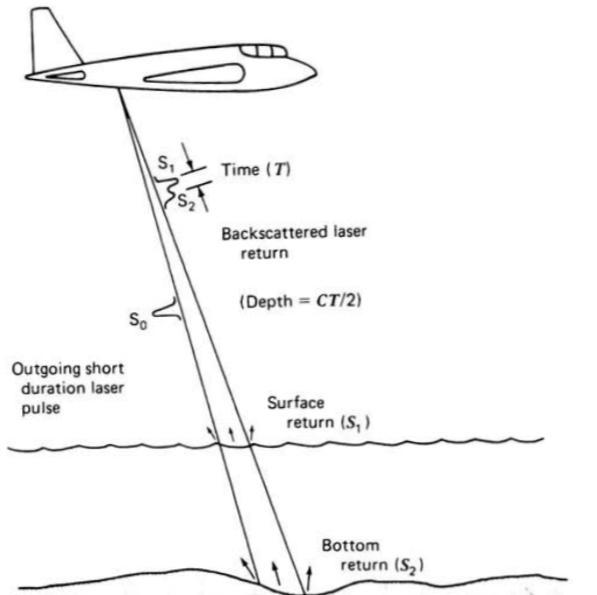
One of LIDAR successful applications was measuring water depths. Using LIDAR started in the late 1970. The concept in LIDAR is the first reflection determine the water surface, followed by a second reflection, it’s weaker reflected pulse from the bottom. Then the depth can be computed from the differential travel time of the reflections.
2. Passive remote sensing technique:
Using passive remote sensing technique in water is complicated due to the interaction with the atmosphere and water. The combined effect of scattering and absorption of dissolved and suspended material will limit the depth penetration, but in clear water the chances of estimation water depths increase. So that a multiple of correction must be carried. Using high-resolution multi spectral sensors can help dealing with this limitation after been validate using bathymetric data from an active sensor light detector and ranging “LIDAR”.
There are different methods to measure water depths by wave bands or combination of wave bands. The visible range band (green/blue) provide high water penetration. according to Mishra: wave bands (green/blue) have different water absorption. One band will have lesser values than the other. And as the depth increases the band with higher absorption (green) decreases proportionally faster than the band with the lower absorption (blue). Then the radiance ratio of blue to green increases. This is the fundamental principle behind using remote sensing in water bathymetric. In simple words: wave length penetrates water in different levels. And the intensity of the remaining light Id after passing p length of water is given by:
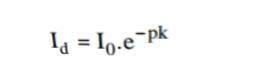
Where: I0 the intensity of incident light, k is attenuation coefficient -varies with wave length-.

The red light does not penetrate water further than 5 m. On the other hand, the blue light penetrates much further and in clear water it can penetrates even if the depth is more than 30 m.
References:
REMOTE SENSING AND IMAGE INTERPRETATION, Thomas M. Lillesand and others.
Deriving Bathymetry from Multispectral Remote Sensing Data, William J. Hernandez and Roy A. Armstrong, Journal of Marine Science and Engineering.
Hydrographic Surveying using High Resolution Satellite Images, Petra PHILIPSON and Frida ANDERSSON, Sweden.
CRUDE BATHYMETRIC MAPPING USING LANDSAT TM SATELLITE IMAGERY.


Comments
Post a Comment